
Inspection Quadruped Robot
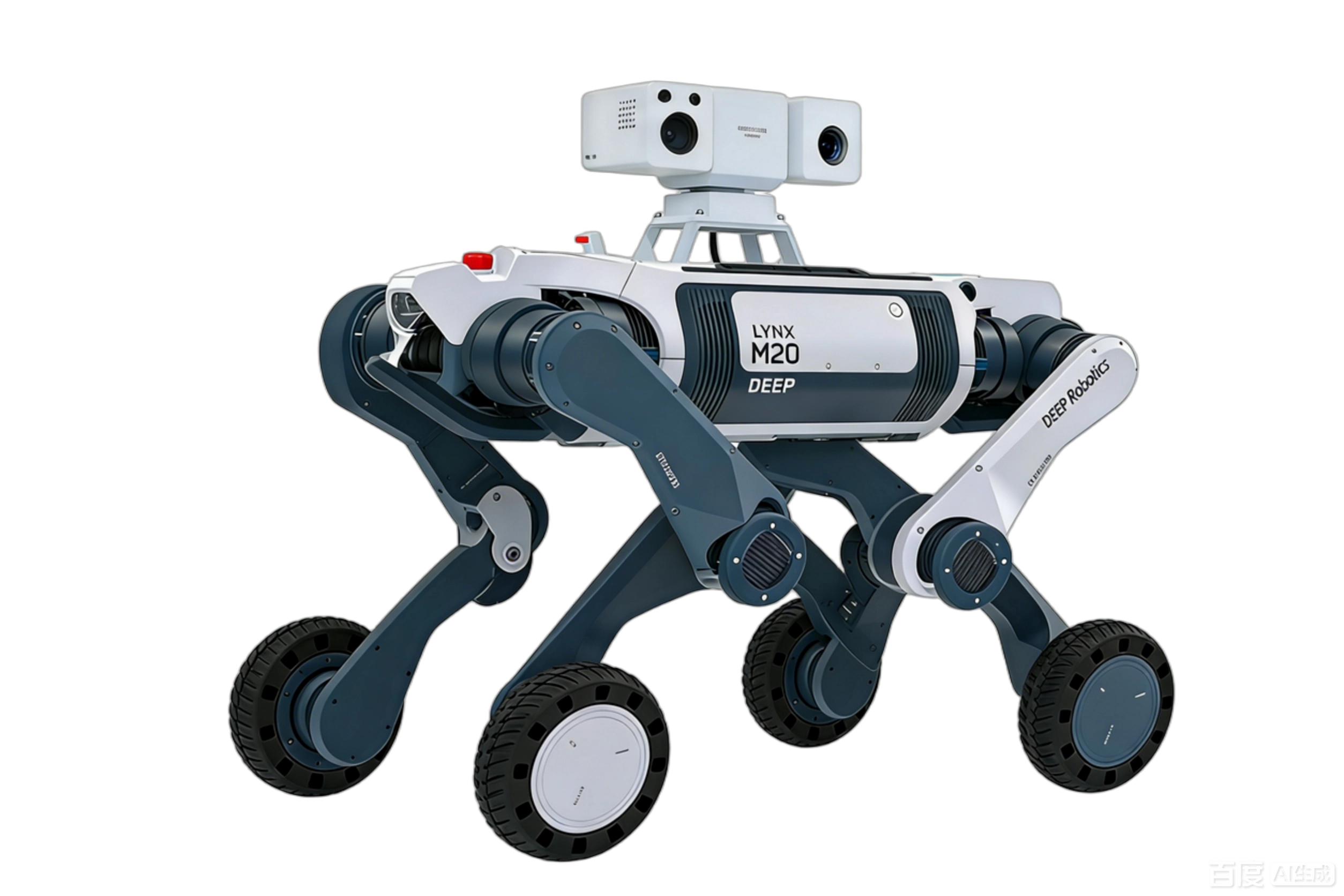
Quadruped robot inspection can obtain the running trajectory of the quadruped robot, reproduce the inspection trajectory of the quadruped robot in real time in the digital twin scene, and understand whether the inspection route is reasonable and whether there is any omission.
 |
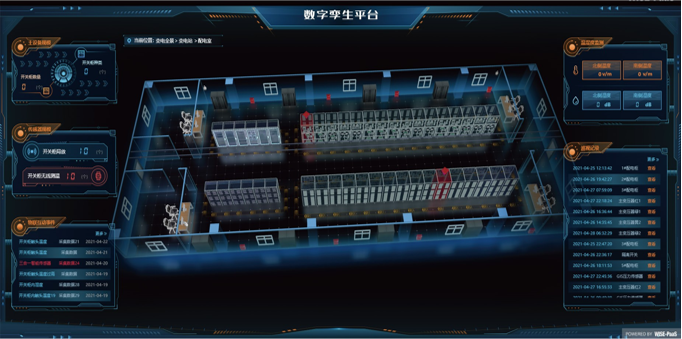 |
First Person View Inspection
Can manually plan the inspection path in the digital twin scenario, allowing the screen to present the automatic inspection process in a first-person perspective, viewing the device status, parameters, and presence of faults and anomalies.
Product Parameters
|
Project |
Parameters |
|
Dimensions |
about 800 × 500 × 600mm |
|
Weight |
33kg |
|
Obstacle Crossing Ability |
80cm single step |
|
Climbing Ability |
45 ° |
|
Ability to climb stairs |
Support 25cm steps |
|
Working Temperature |
-20 ℃ ~ 55 ℃ |
|
Inspection Speed |
5m/s(18km/h) |
|
Lidar |
Line 96 |
|
Continuous Load |
15kg |
|
Battery |
Support hot plug |
|
Endurance |
2.5-3 hours (with 15kg load) |

